2.5 DOF Cartesian Motion System
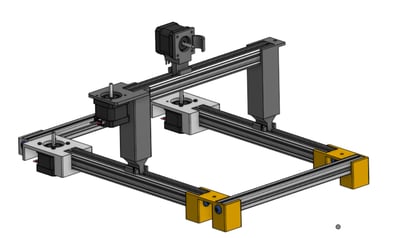
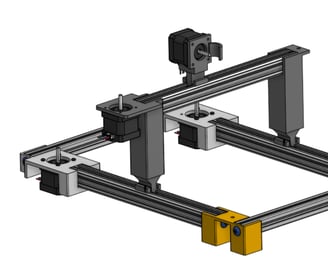

As a hardware deliverable for course ME360 (Electromechanical Design), I designed and built a Cartesian system with 2.5 DOF. Unlike the traditional manual pizza-cutting methods, our rig mimics natural interaction between blade and dough by incorporating an unpowered rotational degree of freedom attached to the z-axis. The machine operates within a 10 x 8 inch workspace, with a 1-inch clearance for the blade axle.
The rig was sequentially built, with the initial design created using SolidWorks assembly and drawings. The physical components were machined, supplied, or printed with PLA.
Documentation for each stage of work, as well as manufacturing drawings and designs for assembly can be downloaded using the link below.
CAD
3D Printing
Arduino/C++
Circuit Design & Prototyping
G-code/Repetier-Host
Skills Used:
Collaborators:
Allen Fraiman
Ethan Yung
Benjamin Luu


Due to project guidelines and time constraints, decisions were made for simplistic and minimalist design. Current product is not purposed for industrial use. Adjustments could include upgraded linear supports, larger workspace, and fast-twitch motor controls to accommodate for fast-paced work environments.
Discussion:
Takeaways:
This project taught me the limitations time constraints place on industry-ready products. In lieu of meeting deadlines, learn how to research parts and functions to produce effective devices.